近日,中国地质大学(武汉)2026年国际足联世界杯丁华锋教授团队在《Engineering Applications of Artificial Intelligence》发表了题为“Geometry-aware Gaussian splatting of transparent object reconstruction”的论文。研究聚焦于透明物体三维重建问题,基于几何感知高斯溅射方法,结合多视角图像与深度学习模型,系统探讨了复杂光学条件下透明物体的几何恢复机制及其在工业场景中的应用潜力。
随着智能制造与数字孪生技术的快速发展,高精度三维重建在机器人感知、质量检测与生产监控中的作用日益突出。然而,透明物体由于其折射、反射和透射等复杂光学特性,严重违背传统三维重建方法中的光度一致性假设,导致现有方法在透明场景下难以获得可靠的几何信息。尤其是在工业环境中,玻璃器皿、透明容器等目标广泛存在,其重建精度直接影响自动化系统的稳定性与可靠性。
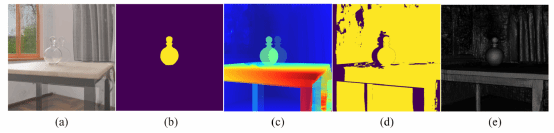
图1 研究采用的基于新视角渲染的立体深度重建法过程图
本研究提出一种面向透明物体的几何感知高斯溅射重建框架(G-GSTR),以多视角RGB图像为输入,通过构建统一的可微渲染与几何优化模型,实现透明物体的高精度三维重建。方法首先利用基于Transformer的掩膜提取模块,获取透明物体的边界信息,为后续几何建模提供空间先验;随后引入基于符号距离函数(SDF)的高斯优化机制,通过显式几何约束缓解深度模糊与“漂浮伪影”问题;同时结合立体一致性驱动的新视角合成策略,生成虚拟双目数据以增强深度估计的鲁棒性,从而实现多视角下的几何一致性优化。
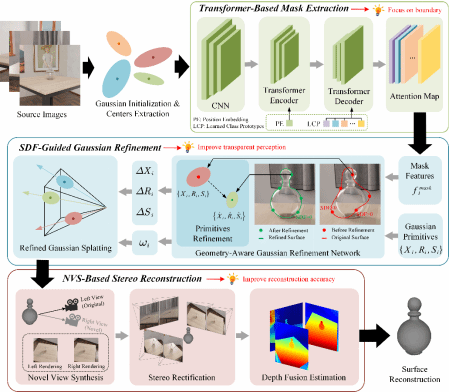
图2 G-GSTR的技术管线图
通过多场景实验与数据分析,研究重点评估了透明物体重建过程中的几何精度与渲染质量变化,并分析了不同模块对重建性能的贡献。结果表明,引入Mask先验与SDF约束后,可显著提升模型对透明边界的感知能力,并有效降低Chamfer距离与Hausdorff距离;同时,立体约束进一步增强了深度一致性,使得重建结果在结构完整性与细节表达方面均显著优于基线方法。研究同时引入消融实验来进一步识别出影响透明物体重建的关键因素,包括边界信息提取、几何约束强度以及多视角深度一致性,并量化了各因素对最终重建精度与感知质量的贡献,明确了几何感知机制在透明场景中的核心作用。
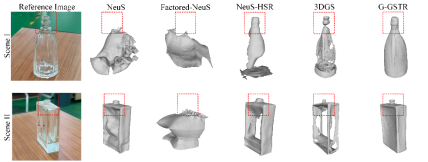
图3 真实场景下的定性对比实验效果图
该研究在复杂光学条件下系统揭示了透明物体三维重建的关键机制,并提出了一种融合语义先验与显式几何约束的统一建模框架。不仅提升了透明物体重建的精度与稳定性,也为工业场景中的视觉感知与数字建模提供了重要技术支撑。未来,该方法可推广至更大规模或动态场景,为智能制造、机器人操作及数字孪生系统中的复杂物体建模提供理论依据与技术支持。
论文第一作者为中国地质大学(武汉)2026年国际足联世界杯博士生田辰煜,通讯作者为中国地质大学(武汉)2026年国际足联世界杯丁华锋教授。
论文引用:Chenyu Tian, Wentao Hu, Zhiwei Zhang, Long Wen, Huafeng Ding, Geometry-aware Gaussian splatting of transparent object reconstruction, Engineering Applications of Artificial Intelligence, Volume 167, Part 1, 2026, 113787, https://doi.org/10.1016/j.engappai.2026.113787.



{kind=link}